
探伤仪的优势
- 由于探伤仪是多通道的,因此可以完全扫描导轨(不包括导轨底座刀片)
- 通道操作的内置标准设置;
- 确定连续测试期间的距离和速度;
- 在B扫描模式下实时显示测试结果(4个通道);
- 从所有通道每隔一毫米的行进距离扫描并保存信息;
- 以不同的灵敏度水平记录的测试结果;
- 注册所有测试结果和数据分析的高级功能;
- 采用标准扫描方案的探伤仪可以检测在铁路轨道运行期间出现的所有类型的致命缺陷。
探伤仪的特色
- 彩色高对比度TFT显示屏;
- 编码器同步;
- 信息显示形式:A扫描,B扫描;
- 连续测试的通道数: 28;
- 手动测试的通道数: 3;
- 轨头测试技术和领域:
- 具有角波束探头的回波技术,用于测试轨道头在运动方向和运动方向上的磁场和轨距。
- 带角波束探头的回波技术,用于测试轨道头在运动方向上和与运动方向相反的中心部分;
- 具有角波束探头的回声镜技术,用于测试轨道头的中心部分在运动方向上和与运动方向相反的方向;
- 具有角波束探头的回波技术,用于测试运动方向和运动方向上的场和量具侧;
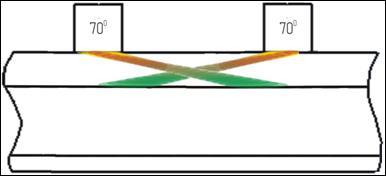
图.回声技术,用于轨头测试
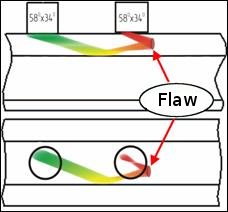
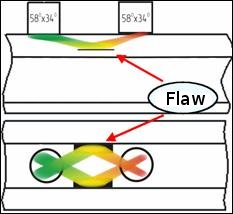
图.回声镜技术用于轨道头测试
- 测试网络及其在基座中的投影的技术和领域
- 具有直光束单晶探针的回波和镜面阴影技术,用于检测纵向水平裂缝;
- 在运动方向上和与运动方向相反的方向上使用角波束探头的回波技术,用于检测横向裂缝和测试螺栓孔;
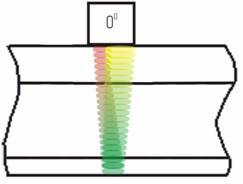
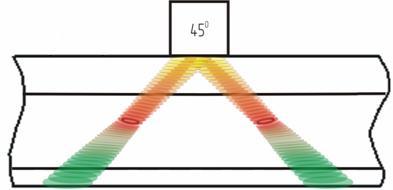
图.用于测试Web和基础的Echo技术
使用标准扫描方案的探伤仪可以检测具有以下特征的所有类型的致命缺陷:
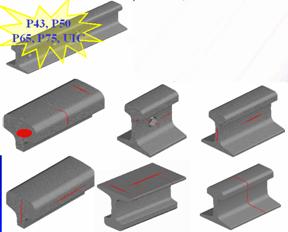

图-严重损坏的导轨的类型
- 第二类钢轨头中的横向裂纹,包括发达的带有反射表面的横向裂纹,以及在水平滚动表面分离下产生的,标准回波技术无法检测到的横向裂纹;
- 腹板中的纵向水平裂缝,即使在发展中未达到钢轨轴线,也包括头部在内,包括未超出腹板突出部分的纵向裂缝;
- 纵向水平裂缝位于钢轨高度的中间;
- 螺栓孔的裂缝,包括在其发展初期的裂缝,只要这些裂缝不超过螺栓孔在辊子表面上的突起;
- 基部和腹板中的垂直裂纹主要沿轨道轴线分布;
- 腹板投影区域中基座的横向腐蚀裂纹。
仪器服务功能

- 声音和视觉警报,借助“热键”进行模式切换;
- 通过所有渠道对测试结果进行电子注册,可以重新解释它们并做出完整的报告;
- 确定滑轨类型和自动校正设置的模式;
- 通过特殊设置测试螺栓孔的模式;
- 实时B扫描可用于一个,两个或四个通道(进出通道的左右轨道),以深入分析检测到的信号,此外还显示以下信息: 扫描形式;
- 绘制TCG曲线(任何形状)的可能性。
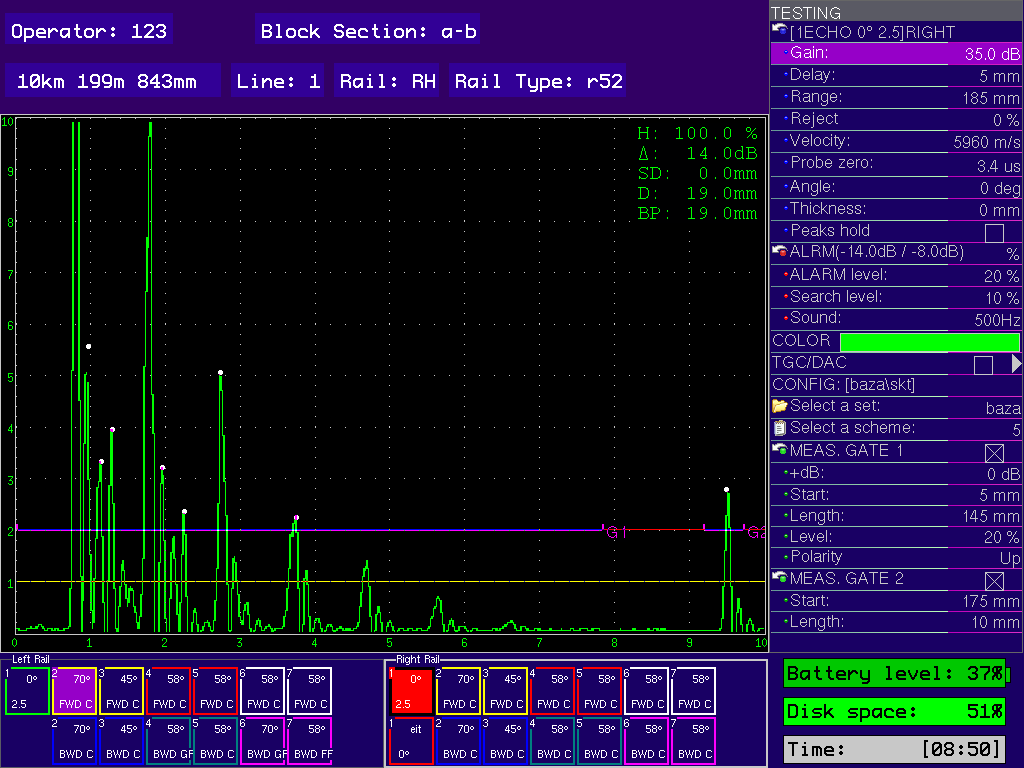

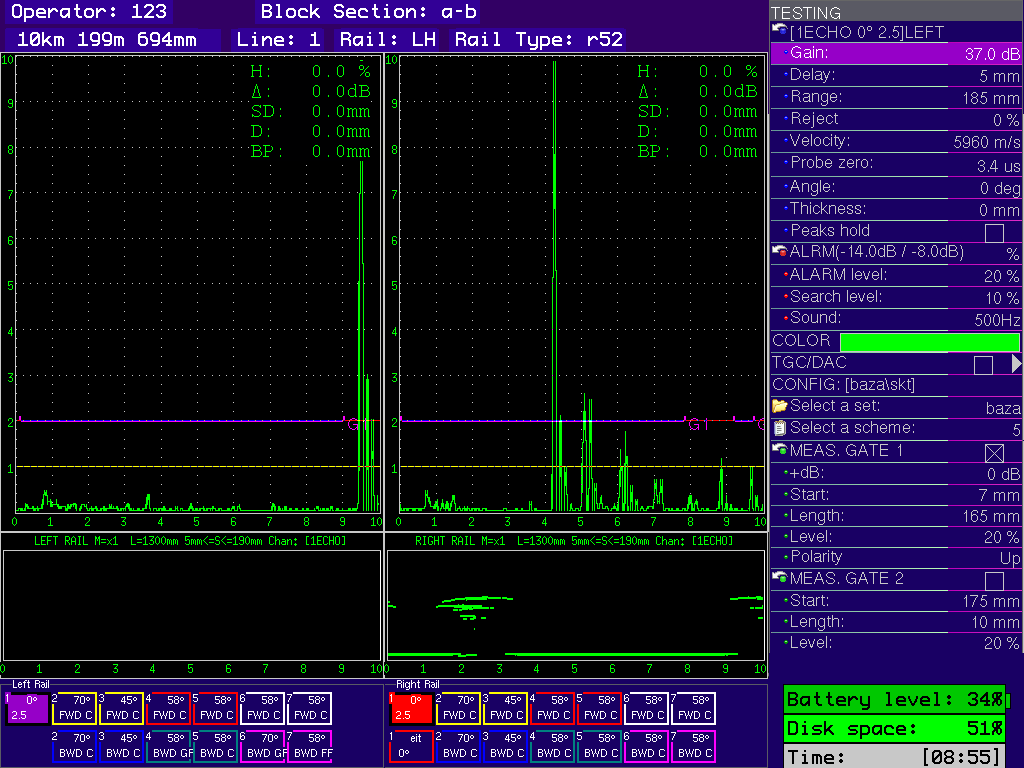
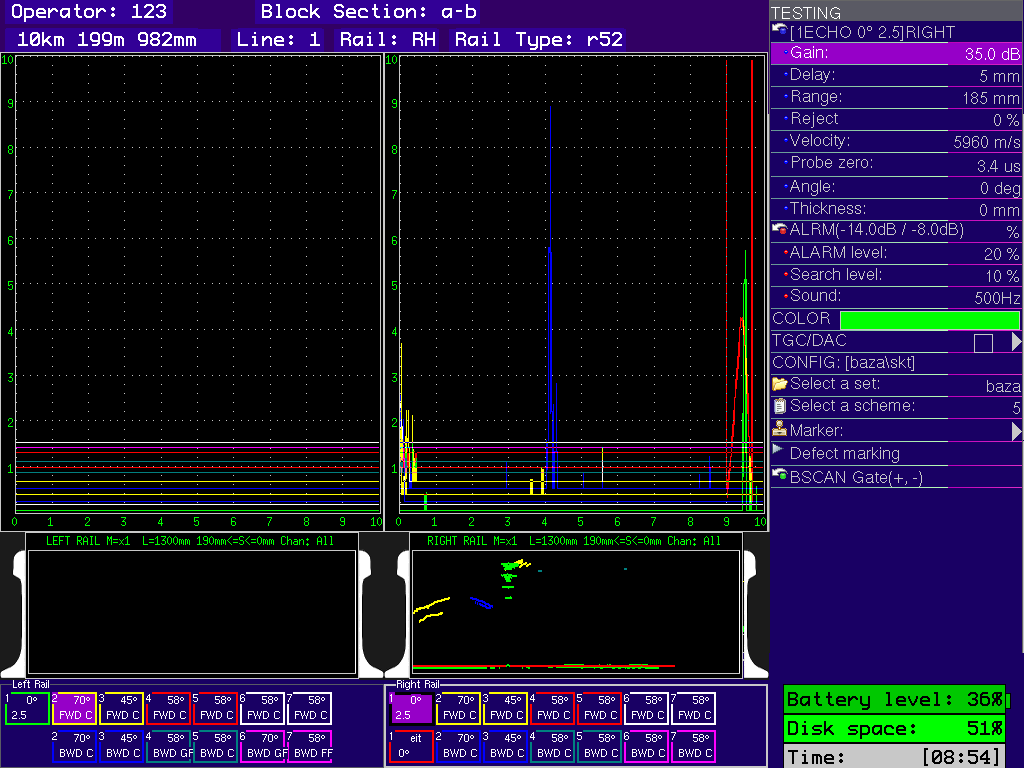
图.测试结果的模式在探伤仪屏幕上以A扫描和B扫描显示
附加软件
"LuCH-Controller 1.6" 用于查看和分析UDS2-73超声波轨道探伤仪的测试结果,以及解释和显示可疑轨道部分的信息。 本程序有助于利用存储在计算机上的数据进行操作。
程序应用程序的主要优点是:
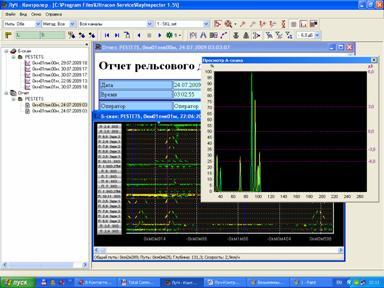
- 通过测试的部分(跨度)数据库方便操作;
- 选择测试通道,测试导轨,测试区域,测试技术的各种分组;
- 在B扫描模式下测量缺陷条件尺寸;
- 根据以B扫描模式记录的数据查看А-扫描;
- 在滚动模式或快速切换到设置坐标的模式下查看缺陷图(B扫描);
- 在查看测试结果时标记可疑路段的路径标记;
- 以相对于警报级别的从负6到正6 dB的灵敏度级别过滤测试结果的模式;
- 在选定要测试的部分上查看和生成报告的模式。
主要规格:
| 不带手柄,带一个超声波装置和动力装置的探伤仪的整体尺寸 | 不大于(1040×1640×1130)毫米; 在运输位置–不超过(900×2060×600)毫米。 | |
| 配备探伤机重量 | 不超过50公斤。 | |
| 键盘 | 英语,俄语。 | |
| 语言能力 | 英语,俄语。 | |
| 超声波单元数量 | 4 | |
| 超声波通道数 | 28 个通道。 | |
| 连接器类型 | BNC, RS-19。 | |
| 数据存储 | 闪存卡。 | |
| 独立电源 | 镍氢电池,标称电压为12 V,标称容量为17 A∙h。 | |
| 运作时间 | 10 小时 | |
| 探伤仪消耗的电能 | 不超过30 V•А。 | |
| 探伤仪操作模式设置时间 | 不超过15秒。 | |
| 显示分辨率 | 800×480 像素。 | |
| 屏幕尺寸(宽度,高度,对角线)分别为 | 155毫米,95毫米,180毫米(7.5英寸)。 | |
| 质保 | 1 年。 | |
| 介面 | ||
| USB | USB-A(主机),USB-B(从机)。 | |
| 触发器O | 可用。 | |
| 耳机 | 可用。 | |
| 编码器输出 | 单坐标编码器。 | |
| 主要计量性能。 | ||
| 探伤仪在测量深度dН和坐标 |
| |
| 在增益范围为20 dB至80 dB的接收路径输入中测量信号幅度比∆N时允许的主要绝对误差限制 | ∆N = ±(0.2+0.03N); ∆N ─ 测量信号振幅比时的主要绝对误差,dB | |
| 连续运行8小时后 | 探伤仪接收路径灵敏度的时间不稳定性为±0.5 dB。 | |
| 防护等级 | IP 64 | |
| 环境 | 温度从负 40° 到正50° °С | |
| 大气压力 | 从 84到106.7 kPa。 | |
| 25ºС温度下的相对湿度(93±3)。 | ||
| 运输包装中的探伤仪可抵抗以下因素的影响: |
| |
| 当探伤仪受到电磁干扰的影响时,探伤仪会保留其参数,但不超过以下标准: |
| |
| 探伤仪的平均平均使用寿命不少于 | 10年。 | |
| 2000小时内无故障运行的可能性不少于0.9。 | ||
| 脉冲发生器 | ||
| 初始脉冲类型负极性的短脉冲。 | ||
| 初始脉冲频率单通道模式 | 频率单通道模式– 250 Hz; 完整模式–不超过1000 Hz。 | |
| 幅度 | 180 V | |
| 持续时间 | 60±10 ns | |
| 上升沿持续时间不超过 | 20 ns | |
| 来自初始脉冲 | 来自编码器的同步类型。 | |
| 接收者 | ||
| 以0.1、1、10 dB的步长从0到100 dB增益。 | ||
| 从峰值到峰值的输入信号不得超过2V。 | ||
| 输入接收路径电阻不超过300Ω。 | ||
| 数字滤波器1个标准数字滤波器,中心频率为2.5 MHz。 | ||
| 整流器外壳。 | ||
| 设置模式 | ||
| 测量 | 毫米 | |
| 测试范围 | 从0到1000毫米,台阶1,10,100毫米。 | |
| 速度 | 从2000 m / s到8000 m / s,以1、10、100、1000 m / s为步长。 | |
| 探头零 | 从0到60 µs,步长为0.1,1 µs。 | |
| 范围延迟 | 从0到1000 µs,步长为1、10、100 µs。 | |
| 探头角度 | 从0到90 0 ,步长1 0 ,10 0 | |
| 循环/门 | ||
| 最大循环数 循环数16. | ||
| 循环持续时间0.01-0.4 ms。 | ||
| 最大循环中的门数 每个通道的门数2。 | ||
| 门固定水平为垂直屏幕刻度的0%至100%。 | ||
| 警报当信号超出警报水平时,当信号保持在警报水平内时。 | ||
| 警报系统 | ||
| 声音报警系统 | 声音–每个轨道分开并合并(对于一组声道); 警报系统声音指示器的脉冲频率设置范围为0.5至5 kHz,步进为100 Hz。 | |
| 轻警报 | 灯光–每个轨道分开并组合(通过所有环绕声通道); 屏幕可视化–每个导轨和每个通道都分开。 | |
| A扫描模式下的测量 | ||
| 显示参数 | 状态栏中显示4个测量参数。 | |
| ||
时间敏感性调整曲线 | 最高 点数是每个周期14个,动态范围100 dB,垂直设置步长1 dB,水平– 2 mm。 | |
| B扫描模式下的测量 | ||
| “原始” B扫描 |
| |








